Boxcar Tab¶
The Boxcar tab relates to the MF-BOX Boxcar Averager option and is only available if this option is installed on the MFLI Instrument (see Information section in the Device tab). For a detailed tutorial on how to set up the MF-BOX Boxcar Averager for pulsed signal measurement, refer to the Boxcar Averager Tutorial.
Features¶
- 1 boxcar unit with up to 500 kHz/5 MHz repetition rate
- Boxcar input selectable between Current or Voltage Input
- Baseline suppression option
- 1 to 1M averaging periods
- 17 ns to 17.5 ms boxcar window width
Description¶
The Boxcar tab provides access to the gated averaging functionality of the MFLI Instrument. Whenever the tab is closed or an additional one of the same type is needed, clicking the following icon will open a new instance of the tab.
| Control/Tool | Option/Range | Description |
|---|---|---|
| Boxcar | Boxcar settings for fast input signals. |
The Boxcar system offers functionality similar to that of a lock-in amplifier by significantly reducing the bandwidth of incoming signals, which are initially sampled at 60 MSa/s. This reduction enables the use of much lower sampling rates for data transfer to a PC via USB or Ethernet for further analysis and processing. Ideally, both methods achieve this data reduction without losing any critical signal information; instead, they discard large portions of the initial signal that are irrelevant or contain negligible information. The operation of a lock-in amplifier is best understood in the frequency domain, where it acts as a sophisticated bandpass filter with adjustable center frequency and bandwidth, simplifying our view by temporarily ignoring phase sensitivity. Analogously, the boxcar averager functions in the time domain, selectively filtering out only the signal components that hold valuable information. For example, this approach is particularly useful in experiments involving pulsed lasers. When duty cycles are low, the relevant time-domain signal information may be minimal; thus, the goal is to capture data only when the laser is active, ignoring intervals dominated by noise.
In classical analog instruments this is typically realized by a switch, that can by triggered externally, and a subsequent integrator. Most often the trigger functionality also allows to configure a time delay and a certain window for as long as the switch shall open up for each trigger and the signal will be integrated. The signal output from the integrator is then passed through an adjustable low-pass filter for further noise reduction.
One of the biggest limitations of analog boxcar instruments is their trigger re-arm time (caused by the finite time required to erase the integrator) which is usually several 10 ms long. During that time no signals can be acquired. For periodic signals this means a limitation to frequencies of a few 10 kHz when signal loss cannot be afforded, measurement time needs to be minimized while high SNR is crucial.
Note
The Zurich Instruments Boxcar employs a synchronous detection approach rather than relying on the traditional triggering method previously described. Instead of using a trigger signal, a reference frequency—sourced from either an external or internal oscillator—is required. The boxcar window is then defined based on the phase of this reference frequency.
Figure 1 shows a detailed block diagram how signal processing is performed.
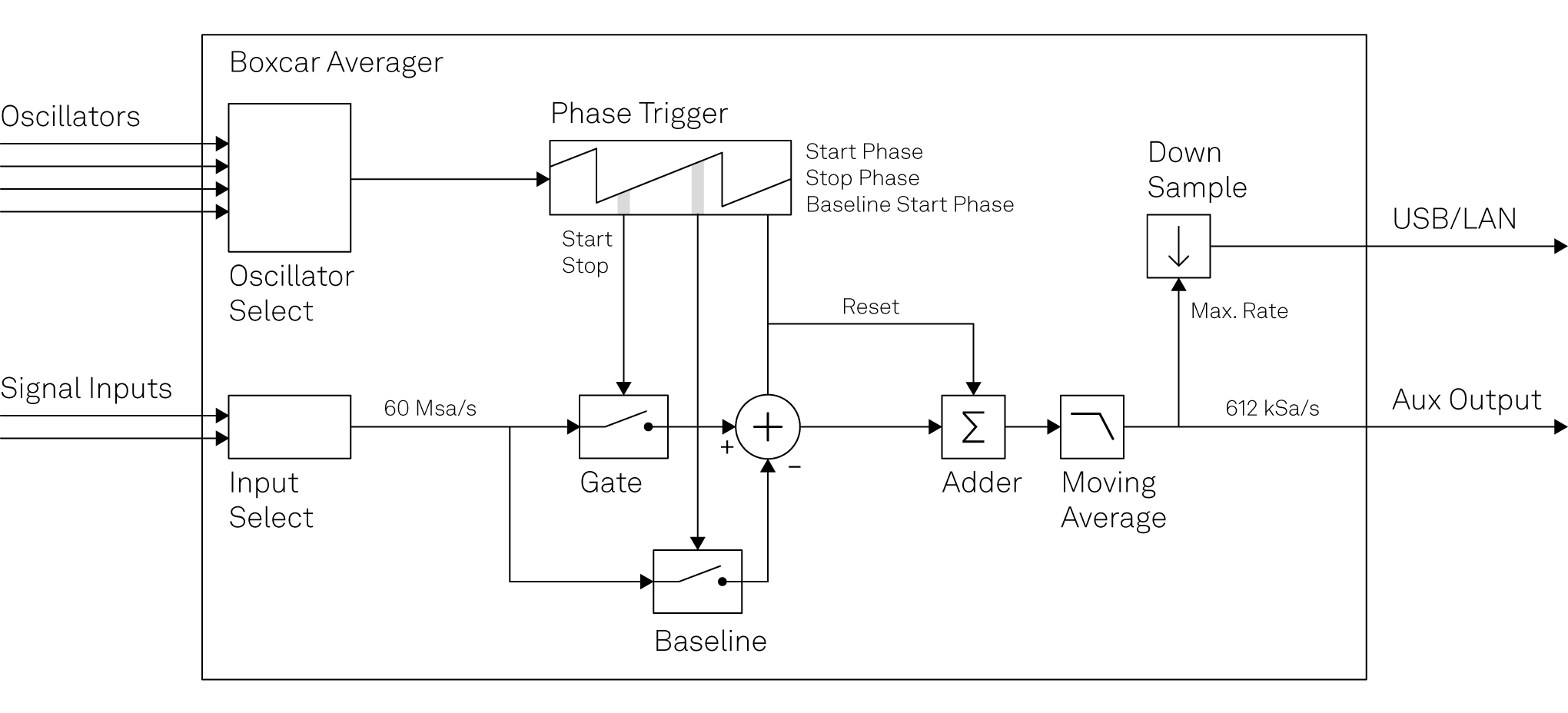
The input signal is sampled at a rate of 60 MSa/s. Depending on the phase of the reference oscillator and the configured Start Phase and Window Width, the amplitude value of each sample within the integration window is summed and output from the Adder after each period. Importantly, since the sum is then divided by the boxcar window's width, the output signal's amplitude is not necessarily proportional to the actual SNR or the measurement's quality. For instance, a single sample could yield a higher output amplitude compared to summing multiple samples and then dividing over a broader window width. Therefore, to accurately assess the measurement's quality, one should evaluate the SNR, which is available via the math tools in the Plotter. Following the summation and scaling process, the output undergoes a moving average filter stage, allowing for averaging over an adjustable number of reference oscillator periods.
Note
The moving average filter provides up to 512 intermittent results. That means if Averaging Periods is set to 1024 the Output is updated with a new value every second oscillator period whereas for smaller numbers of averaging periods this update is performed on every cycle.
Functional Elements¶
| Control/Tool | Option/Range | Description |
|---|---|---|
| Enable | ON / OFF | Enable the BOXCAR unit |
| Input Signal | 1/2 | Select Signal Input used for the boxcar analysis. |
| Osc | oscillator index | Selection of the oscillator used for the boxcar analysis. |
| Frequency (Hz) | frequency value | Oscillator frequency used for the boxcar analysis. |
| Start Mode | Selects the mode to specify the start of the boxcar averaging gate opening. The phase (deg) is the native mode for the device. | |
| Start (deg) | Native definition of the boxcar averaging gate start as phase. | |
| Start (s) | Definition of the boxcar averaging gate start as time. Due to the conversion to phase on the device a small uncertainty window exists. | |
| Start (deg) | 0 to 360 | Boxcar averaging gate opening start in degrees. It can be converted to time assuming 360 equals to a full period of the driving oscillator. |
| Start Time (s) | 0 to period | Boxcar averaging gate opening start in seconds based on one oscillator frequency period equals 360 degrees. Boxcar must be disabled to edit input field. |
| Width Mode | Selects the mode to specify the width of the boxcar averaging gate opening. The time (s) is the native mode for the device. | |
| Width (deg) | Definition of the averaging gate width as phase. | |
| Width (s) | Native definition of the averaging gate width as time. | |
| Width (pts) | Definition of the averaging gate width in samples. | |
| Width (deg) | 0 to 360 | Boxcar averaging gate opening width in degrees based on one oscillator frequency period equals 360 degrees. Boxcar must be disabled to edit input field. |
| Width (s) | 16.67 ns to period | Boxcar averaging gate opening width in seconds. It can be converted to phase assuming 360 equals to a full period of the driving oscillator. |
| Width (pts) | Integer value | Boxcar averaging gate opening width in samples at 60 MHz rate. |
| Too large gate width | grey/red | Boxcar averaging gate opening width is more than one cycle of the signal and should be reduced. |
| Start Mode | Selects the mode to specify the start of the boxcar baseline suppression gate opening. The phase (deg) is the native mode for the device. | |
| Start (deg) | Native definition of the boxcar baseline suppression gate start as phase. | |
| Start (s) | Definition of the boxcar baseline suppression gate start as time. | |
| Offset (deg) | Definition of the boxcar baseline suppression gate start relative to the gate opening start as phase. | |
| Offset (s) | Definition of the boxcar baseline suppression gate start relative to the gate opening start as time. | |
| Start (deg) | 0 to 360 | Boxcar baseline suppression gate opening start in degrees based on one oscillator frequency period equals 360 degrees. |
| Start (s) | 0 to period | Boxcar baseline suppression gate opening start in seconds based on one oscillator frequency period equals 360 degrees. |
| Offset (deg) | 0 to 360 | Boxcar baseline suppression gate opening start in degrees relative to Gate Start. |
| Offset (s) | 0 to period | Boxcar baseline suppression gate opening start in seconds relative to Gate Start. |
| Enable | ON / OFF | Enable Baseline Suppression |
| Averaging Periods | 1 to 2^20 | Number of periods to average. The output will be refreshed up to 512 times during the specified number of periods. |
| Averaging BW | 10 µHz to 312 kHz | The 3 dB signal bandwidth of the Boxcar Averager is determined by the oscillation frequency and the number of averaging periods set. Note: internally the boxcar signal is sampled at a rate of 625 kSa/s and the signal bandwidth of the auxiliary output is 200 kHz. |
| Rate Limit (Sa/s) | 1.0 Sa/s to 1.0 MSa/s | Rate Limit for Boxcar output data sent to PC. This value does not affect the Aux Output for which the effective rate is given by min(612 kSa/s, Frequency / max(1, Averaging Periods/512)). |
| Data Rate (Sa/s) | 0 to 625.0 kSa/s | Display the currently effective rate used for data transfer to the PC given by min(625 kSa/s , Frequency / max(1, Averaging Periods/512)). This value is read-only. |
| Oversampling | Integer value, ideally 0 | Indicates, in powers of 2, the number of averager outputs sent to the PC while Averaging Periods Boxcar integrations are obtained. Positive integer values indicate oversampling. Negative integer values indicate undersampling. Examples for oversampling values: 0 : 2^0 = 1 averager output is sent to the PC during Averaging Periods Boxcar integrations. 2 : 2^2 = 4 averager outputs are sent to the PC during Averaging Periods Boxcar integrations. -1 : 2^-1 = 0.5, only every other Averaging Periods Boxcar integrations an averager output is sent to the PC. |
| Value | numeric value | The current boxcar output. |
| Sample Loss | grey/red | Data lost during streaming to PC. Sticky flag cleared by restarting the boxcar. |